Physics Manager
Use the Physics Manager to apply global settings for 3D physics. To access it, go to Edit > Project Settings > Physics. To manage global settings for 2D physics, use the Physics 2D Manager.
The settings of the PhysicsManager define limits on the accuracy of the physical simulation. Generally speaking, a more accurate simulation requires more processing overhead, so these settings offer a way to trade off accuracy against performance. See the Physics section of the manual for further information.
| Property: | Function: |
|---|---|
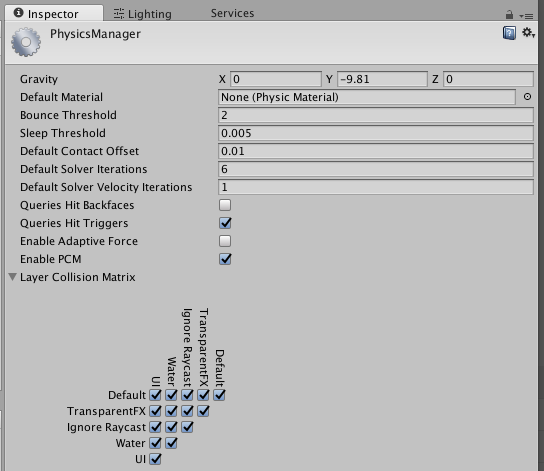
| Gravity | Use the x, y and z axes to set the amount of gravity applied to all Rigidbody components. For realistic gravity settings, apply a negative number to the y axis. Gravity is defined in world units per seconds squared. Note: If you increase the gravity, you might need to also increase the Default Solver Iterations value to maintain stable contacts. |
| Default Material | Use this field to define the default Physics Material that is used if none has been assigned to an individual Collider. |
| Bounce Threshold | Use this to set a velocity value. If two colliding objects have a relative velocity below this value, they do not bounce off each other. This value also reduces jitter, so it is not recommended to set it to a very low value. |
| Sleep Threshold | Use this to set a global energy threshold, below which a non-kinematic Rigidbody (that is, one that is not controlled by the physics system) may go to sleep. When a Rigidbody is sleeping, it is not updated every frame, making it less resource-intensive. If a Rigidbody’s kinetic energy divided by its mass is below this threshold, it is a candidate for sleeping. |
| Default Contact Offset | Use this to set the distance the collision detection system uses to generate collision contacts. The value must be positive, and if set too close to zero, it can cause jitter. This is set to 0.01 by default. Colliders only generate collision contacts if their distance is less than the sum of their contact offset values. |
| Default Solver Iterations | Solvers are small physics engine tasks which determine a number of physics interactions, such as the movements of joints or managing contact between overlapping Rigidbody components. Use Default Solver Iterations to define how many solver processes Unity runs on every physics frame. This affects the quality of the solver output and it’s advisable to change the property in case non-default Time.fixedDeltaTime is used, or the configuration is extra demanding. Typically, it’s used to reduce the jitter resulting from joints or contacts. |
| Default Solver Velocity Iterations | Use this to set how many velocity processes a solver performs in each physics frame. The more processes the solver performs, the higher the accuracy of the resulting exit velocity after a Rigidbody bounce. If you experience problems with jointed Rigidbody components or Ragdolls moving too much after collisions, try increasing this value. |
| Queries Hit Backfaces | Tick the checkbox if you want physics queries (such as Physics.Raycast) to detect hits with the backface triangles of MeshColliders. This setting is unticked by default. |
| Queries Hit Triggers | Tick the checkbox if you want physics hit tests (such as Raycasts, SphereCasts and SphereTests) to return a hit when they intersect with a Collider marked as a Trigger. Individual raycasts can override this behavior. This setting is ticked by default. |
| Enable Adaptive Force | The adaptive force affects the way forces are transmitted through a pile or stack of objects, to give more realistic behaviour. Tick this box to enable the adaptive force. This setting is unticked by default. |
| Enable PCM | Tick this checkbox to enable the persistent contacts manifold (PCM) contacts generation method of the physics engine. This means that fewer contacts are regenerated every physics frame, and more contact data is shared across frames. The PCM contacts generation path is also more accurate, and usually produces better collision feedback in most of the cases. See Nvidia documentation on Persistent Contact Manifold for more information. Note: Before Unity 5.5, Unity used a contacts generation method called SAT, based on the separating axis theorem (see dyn4j.org’s guide to SAT). PCM is more efficient, but for older projects, you might find it easier to continue using SAT, to avoid needing to retweak physics slightly. PCM can result in a slightly different bounce, and fewer useless contacts end up in the contacts buffers (that is, the arrays you get in the Collision instance passed to OnCollisionEnter, OnCollisionStay, OnCollisionExit). |
| Layer Collision Matrix | Use this to define how the layer-based collision detection system behaves. |
2017–05–18 Page amended with limited editorial review - Leave page feedback
Settings added in 5.5: Default Solver Iterations, Default Solver Velocity Iterations, Queries Hit Backfaces, Enable PCM
Copyright © 2023 Unity Technologies
优美缔软件(上海)有限公司 版权所有
"Unity"、Unity 徽标及其他 Unity 商标是 Unity Technologies 或其附属机构在美国及其他地区的商标或注册商标。其他名称或品牌是其各自所有者的商标。
公安部备案号:
31010902002961