Rigidbody
Los Rigidbodies le permite a sus GameObjects actuar bajo el control de la física. El Rigidbody puede recibir fuerza y torque para hacer que sus objetos se muevan en una manera realista. Cualquier GameObject debe contener un Rigidbody para ser influenciado por gravedad, actué debajo fuerzas agregadas vía scripting, o interactuar con otros objetos a través del motor de física NVIDIA Physx.

Propiedades
| Propiedad: | Función: |
|---|---|
| Mass | La masa del objeto (en Kilogramos por defecto). |
| Drag | Qué tanta resistencia al aire afecta el objeto cuando se mueva con fuerzas. 0 significa sin resistencia al aire, e infinidad hace que el objeto pare de moverse inmediatamente. |
| Angular Drag | Qué tanta resistencia al aire afecta el objeto cuando gire desde un torque. 0 significa sin ninguna resistencia al aire. Tenga en cuenta que usted no puede hacer que objeto pare de girar simplemente ajustando su Angular Drag a infinidad. |
| Use Gravity | Si está activado, el objeto es afectado por gravedad. |
| Is Kinematic | Si está activado, el objeto no será manejado por el motor de física, y puede solo ser manipulado por su Transform. Esto es bueno para plataformas que se muevan o si usted quiere animar un Rigidbody que tiene un HingeJoint adjunto. |
| Interpolate | Intente una de las opciones si usted está viendo que los movimientos de su Rigidbody estén sacudidos. |
| - None | Ninguna interpolación es aplicada. |
| - Interpolate | El transform es suavizado básandose en el transform del cuadro previo. |
| - Extrapolate | El transform es suavizado básandose en el transform estimado para el siguiente cuadro. |
| Collision Detection | Utilizado para prevenir que objetos que se estén moviendo rápido pasen a través de otros objetos sin detectar colisiones. |
| - Discrete | Use discrete collision detection against all other Colliders in the Scene. Other colliders will use discrete collision detection when testing for collision against it. Used for normal collisions (This is the default value). |
| - Continuous | Use Discrete collision detection against dynamic Colliders (with a Rigidbody) and sweep-based continuous collision detection against static Colliders (without a Rigidbody). Rigidbodies set to Continuous Dynamic will use continuous collision detection when testing for collision against this rigidbody. Other rigidbodies will use Discrete Collision detection. Used for objects which the Continuous Dynamic detection needs to collide with. (This has a big impact on physics performance, leave it set to Discrete, if you don’t have issues with collisions of fast objects) |
| - Continuous Dynamic | Use sweep-based continuous collision detection against GameOjects set to Continuous and Continuous Dynamic collision. It will also use continuous collision detection against static Colliders (without a Rigidbody). For all other colliders, it uses discrete collision detection. Used for fast moving objects. |
| - Continuous Speculative | Use speculative continuous collision detection against Rigidbodies and Colliders. This is also the only CCD mode that you can set kinematic bodies. This method tends to be less expensive than sweep-based continuous collision detection. |
| Constraints | Restricciones en el movimiento del Rigidbody :- |
| - Freeze Position | Detiene al Rigidbody que se mueva en los ejes X, Y y Z del mundo selectivamente. |
| - Freeze Rotation | Detiene que el Rigidbody gire alrededor de los ejes X, Y y Z locales selectivamente. |
Detalles
Los Rigidbodies permiten que sus GameObjects actúen bajo el control del motor de física. Esto abre la puerta de entrada a comportamientos tales como colisiones realistas y tipos variados de articulaciones. Manipular sus GameObjects agregando fuerzas a un Rigidbody crea una sensación y una apariencia muy diferentes que ajustar el transform del Component directamente. Generalmente, no debe manipular el Rigidbody y el Transform del mismo GameObject, solo uno o el otro.
La diferencia más grande entre manipular el Transform vs el Rigidbody es el uso de fuerzas. Los Rigidbodies pueden recibir fuerzas y torque, pero el Transforms no puede. Los Transform pueden ser trasladados y girados, pero esto no es lo mismo que utilizar física. Usted notará la diferencia clave cuando lo intente usted mismo. Agregando fuerzas/torque al Rigidbody puede cambiar la posición y la rotación del componente Transform del objeto. Esta es la razón por la cual usted debería solamente utilizar una o la otra. Cambiar el Transform mientras utilice física puede causar problemas con colisiones y otros cálculos.
Los Rigidbodies deben ser explícitamente agregados a su GameObject antes de que sean afectados por el motor de física. Usted puede agregar un Rigidbody a su objeto seleccionado desde Components->Physics->Rigidbody en la barra de menú. Ahora su objeto está listo con física; este caerá bajo la gravedad y puede recibir fuerzas via scripting, pero usted pueda que necesite agregar un Collider o Joint para obtener que se comporte como usted quiere.
Crianza
Cuando un objeto está debajo del control de física, este se mueve semi-independientemente de la manera en que el transform de sus padres de mueva. Si usted mueve cualquier padre, estos jalarán el hijo Rigidbody a lo largo con ellos. Sin embargo, el Rigidbodies también se caerán gracias a la gravedad y la reacción a eventos de colisión.
Scripting
Para controlar sus Rigidbodies, usted va a principalmente necesitar utilizar scripts para agregar fuerzas o torque. Usted hace esto llamando AddForce() y AddTorque() en el rigidbody del objeto. Recuerde que usted no debería directamente alterar el transform del objeto cuando usted está utilizando física.
Animación
Para algunas situaciones, principalmente creando efectos de ragdoll, es necesario cambiar el control del objeto entre animaciones y física. Para este propósito los Rigidbodies pueden ser marcados isKinematic. Mientras que el Rigidbody esté marcado isKinematic, este no será afectado por colisiones, fuerzas, o cualquier otra parte del sistema de física. Esto significa que usted va a necesitar controlar los objetos manipulando el componente Transform directamente. Los Rigidbodies Kinematic van a afectar otros objetos, pero ellos mismos no serán afectados por física. Por ejemplo, las Articulaciones (Joints) que estén adjuntos a objetos Kinematic van a restringir otros Rigidbodies adjuntos a ellos y Kinematic Rigidbodies van a afectar otros Rigidbodies a través de colisiones.
Colliders
Los Colliders son otro tipo de componente que debe ser agregado a lo largo del Rigidbody con el fin de permitir que otras colisiones ocurran. Si dos Rigidbodies se chocan entre ellas, el motor de física no va a calcular una colisión al menos que ambos objetos también tengan un Collider adjunto. Los Rigidbodies sin Colliders simplemente pasarán a través de cada uno durante otras simulaciones de física.
Agregue un Collider con el menú Component->Physics. Mire la página de referencia del Componente de cualquier Collider individual para información más especifica:
- Box Collider - una figura primitiva de un cubo
- Sphere Collider - una figura primitiva de una esfera
- Capsule Collider - una figura primitiva de una capsula
- Mesh Collider - crea un collider del mesh del objeto, no puede colisionar con otro Mesh Collider
- Wheel Collider - específicamente para crear carros o otros vehículos en movimiento
- Terrain Collider - Manejan colisiones con el sistema de terrain (terrenos) de Unity
Compound Colliders (Colliders Compuestos)
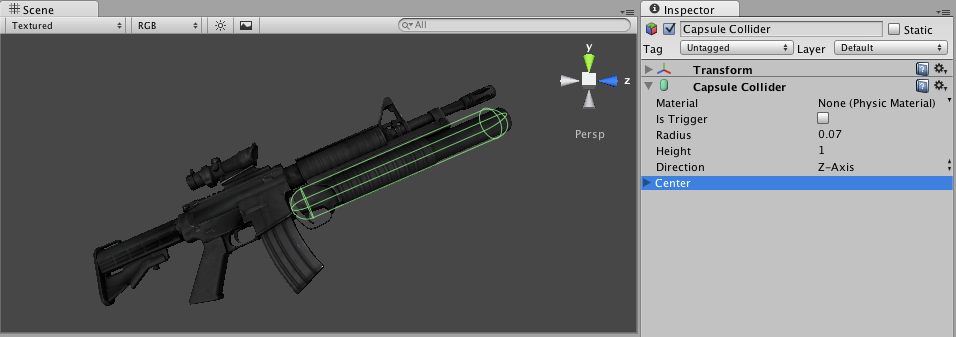
Compound Colliders are combinations of primitive Colliders, collectively acting as a single Rigidbody. They come in handy when you have a model that would be too complex or costly in terms of performance to simulate exactly, and want to simulate the collision of the shape in an optimal way using simple approximations. To create a Compound Collider, create child objects of your colliding object, then add a Collider component to each child object. This allows you to position, rotate, and scale each Collider easily and independently of one another. You can build your compound collider out of a number of primitive colliders and/or convex mesh colliders.
Una configuración del mundo real de un Compound Collider
{kind=link}
En la foto de arriba, el GameObject Gun Model tiene un Rigidbody adjunto, y múltiplos Colliders primitivos como GameObjects hijos. Cuando el padre Rigidbody es movido alrededor por fuerzas, los colliders hijos se mueve con él. Los Colliders primitivos van a colisionar con el entorno del Mesh Collider, y el Rigidbody del padre va a alterar la manera en que se mueva basándose en las fuerzas siendo aplicadas a él y cómo sus colliders hijos interactuar con otros Colliders en la escena.
Cuando los Mesh Colliders no pueden normalmente colisionar con cada uno. Si un Mesh Collider es marcado como Convex, entonces puede colisionar con otro Mesh Collider. La solución típica es utilizar Colliders primitivos para cualquier objeto que se mueva, y los Mesh Colliders para objetos de fondo estáticos.
Note: Compound colliders return individual callbacks for each collider collision pair when using Collision Callbacks.
Continuous Collision Detection (Detección de Colisión Continúa)
Continuous Collision detection es una característica para prevenir que los colliders que se muevan de manera rápida se pasen entre ellos. Esto puede suceder cuando utilice la normal (Discrete) collision detection, cuando un objeto es un lado de un collider en un cuadro, y ya paso el collider en el siguiente cuadro. Para resolver esto, usted puede activar continuous collision detection en el rigidbody del objeto que se está moviendo rápido. Configure el modo de collision detection a Continuous para prevenir que el rigidbody pase a través de cualquier (ie, no rigidbody) MeshCollider estático. Configurelo a Continuous Dynamic para prevenir que el rigidbody pase a tráves de cualquier otro rigidbody soportado con collision detection mode establecido a Continuous o _Continuous Dynamic. Continuous collision detection es soportado para Box-, Sphere- y CapsuleColliders. Tenga en cuenta que continuous collision detection está intencionado como una red de seguridad para atrapar colisiones en casos dónde los objetos de otro modo pasaría a través de ellos, pero no va a entregar resultados colisiones de física precisos, por lo que usted podría seguir considerando disminuir el valor de fixed time step en el inspector del TimeManager para hacer la simulación más precisa,si usted corre en problemas con objetos que se está moviendo rápido.
Utilice el tamaño correcto
El tamaño del mesh de su GameObject es mucho más importante que la masa de su Rigidbody. Si usted encuentra que su Rigidbody no se está comportando como usted espera - se mueve lento, levita, o no colisionar correctamente - considere ajustar la escala de su mesh asset. La escala predeterminada de unidades de Unity es 1 unidad = 1 metro, entonces la escala de su mesh importado se mantiene, y aplicado a los cálculos de física. Por ejemplo, , un rascacielos en ruinas que se va a caer es muy diferente que una torre hecha de bloques de juguete, entonces los objetos de diferentes tamaños deberían ser modelados a una escala precisa.
Si usted está modelando un humano asegures de que sea 2 metros alto en Unity. Para revisar si su objeto tiene el tamaño correcto comparado al cubo predeterminado. Usted puede crear un cubo utilizando GameObject > 3D Object > Cube. La altura del cubo será exactamente 1 metro, por lo que su humano debería ser dos veces así de grande.
Si usted no es capaz de ajustar el mesh por sí mismo, usted puede cambiar la escala uniforme de un mesh asset en particular seleccionándolo en el Project View y escogiendo Assets->Import Settings… del menú. Aquí, usted puede cambiar la escala y re-importar su mesh.
Si su juego requiere que su GameObject necesite ser instancia en diferentes escalas, está bien ajustar los valores de los ejes de escala del transform. Lo malo es que la simulación de física debe hacer más trabajo en el tiempo en el que el objeto es instancia, y puede causar un decrecimiento de rendimiento en su juego. Esto no es una perdida terrible, pero no es tan eficiente como finalizar su escala con las otras dos opciones. También tenga en cuenta que las escalas no-uniformes puede crear comportamientos no deseados cuando la Crianza es utilizada. Por estas razones siempre es optimo crear su objeto en la escala correcta en la aplicación de su modelado.
Consejos
- La Mass relativa de dos Rigidbodies determina cómo reaccionan cuando colisionan uno con el otro.
- Hacer que un Rigidbody tenga mayor Mass que otro no hace que se caigan más rápido en caída libre. Utilice Drag para eso.
- Un valor Drag bajo hace que un objeto parezca pesado. Uno alto hace que se parezca liviano. Los valores típicos para un Drag están entre .001 (un bloque solido de metal) y 10 (pluma).
- Si usted está directamente manipulando el componente Transform de su objeto pero todavía quiere físicas, adjunte un Rigidbody y asegurese de que sea Kinematic.
- Si usted está moviendo un Gameobject a través de su componente Transform pero usted quiere recibir mensajes de Colisión/Trigger, usted debe adjuntar un Rigidbody al objeto el cual se está moviendo.
- Usted no puede hacer que un objeto detenga su rotación simplemente ajustando su Angular Drag a infinito.
2018–10–12 Page amended
Continuous Speculative collision detection method added in 2018.3
Copyright © 2023 Unity Technologies
优美缔软件(上海)有限公司 版权所有
"Unity"、Unity 徽标及其他 Unity 商标是 Unity Technologies 或其附属机构在美国及其他地区的商标或注册商标。其他名称或品牌是其各自所有者的商标。
公安部备案号:
31010902002961