シミュレーション環境のコンポーネントリファレンスガイド
このセクションでは、Unity MARS のプロキシには含まれないものの MARS シミュレーション環境で使用されるコンポーネントについて説明します。一般に、これらのコンポーネントでは、シミュレーション環境の構成を設定します。
シミュレーション環境で現実世界のデータのシミュレーションを行うコンポーネントについては、Synthetic Data (合成データ) に関するセクションを参照してください。
Ignore For Environment Persistence (IgnoreForEnvironmentPersistence)

シミュレーション環境に移動/変化するオブジェクトがある場合に、環境の保存ポップアップダイアログがトリガーされないようにそのオブジェクトを無視してするために使用します。このスクリプトは合成ボディで使用されます。
| ターゲットとの関係 | 説明 |
|---|---|
| Ignore Children Also | オンにすると、このオブジェクトおよびその子により実行されるすべての変更が無視されます。 |
Simulated Object (SimulatedObject)

このオブジェクトを、現実世界のデータをシミュレーションした代替物と見なします。MARS データプロバイダーレイヤーを介して合成コンポーネントからデータをフィードするには、このコンポーネントを Synthesized Object の代わりに使用します。これにより、デバイスで受信する場合と同様に、データを使用してコンテンツをテストできます。
MARS Environment Settings (MARSEnvironmentSettings)
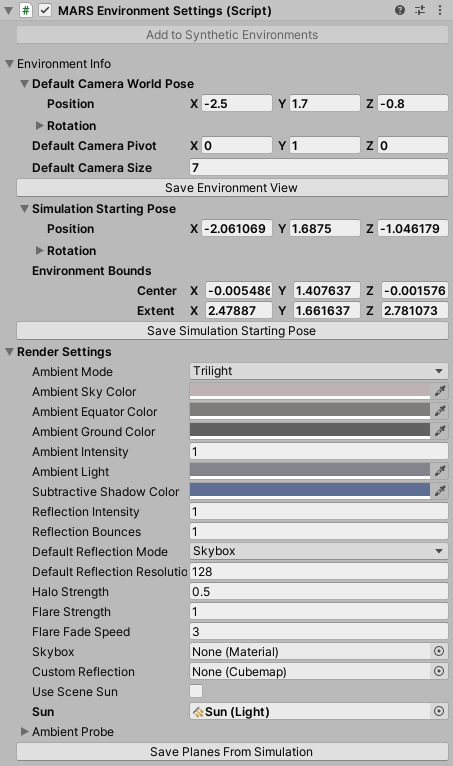
MARSEnvironmentSettings コンポーネントは、シミュレーションビューでのシミュレーション環境の表示に関連するすべてのデータを保持します。このコンポーネントで、デフォルトのカメラポーズの制御、シミュレーションの開始位置の定義、環境の描画方法に関するいくつかのオプションの設定を行うことができます。
Environment Info
以下のプロパティでは、シミュレーションビューのカメラの開始位置と MARSCamera の開始位置を制御します。
| ターゲットとの関係 | 説明 |
|---|---|
| Environment Info | 環境シーンの設定を保持します。 |
| Default Camera World Pose | この環境シーンがロードされたときのカメラの初期ワールドのポーズを指定します。 |
| Default Camera Pivot | この環境シーンのシーンカメラについて、デフォルトのワールドのピボットを指定します。 |
| Default Camera Size | この環境シーンを表示する際のカメラのデフォルトの軌道半径を指定します。 |
| Save Environment View ボタン | クリックすると、この環境シーンのデフォルトのカメラ設定が、現在のシーンビューまたはシミュレーションビューのカメラに合わせて保存されます。 |
| Simulation Starting Pose | シミュレーションを開始するときのデバイスのワールドのポーズ (デバイスビューモード) を指定します。 |
| Environment Bounds | シミュレーション環境全体を内包する境界を設定します。 |
| Save Simulation Starting Pose ボタン | クリックすると、この環境のシミュレーションされたデバイスの開始ポーズが、現在のシーンビューまたはシミュレーションビューのカメラに合わせて保存されます。 |
Render Settings
Unity MARS の Composite Rendering (合成レンダリング) で合成環境をレンダリングする場合、Render Settings セクションがシーンのライト設定よりも優先されます。ベイク済みの設定はシーンに関連付けられているため、これらの設定はリアルタイムライティングオプションに限定されます。
| ターゲットとの関係 | 説明 |
|---|---|
| Render Settings | シミュレーション環境のレンダリング方法を定義する設定のセット。 |
| Ambient Mode | シミュレーション環境に適用するアンビエントモードのタイプを指定します (空、赤道、地面の色がそれぞれ異なるディレクショナルアンビエントや、単色のフラットアンビエントなど)。 |
| Ambiend Sky Color | Ambient Mode が Trilight に設定されている場合、Trilight アンビエントライティングモードでは、この色がオブジェクトの上向きの部分に反映されます。 |
| Ambient Ground Color | Ambient Mode が Trilight に設定されている場合、Trilight アンビエントライティングモードでは、この色がオブジェクトの下向きの部分に反映されます。 |
| Ambient Intensity | アンビエントソースからの光がシーンに与える影響の度合いを指定します。 |
| Ambient Light | Flat アンビエントライティングの色を指定します。 |
| Substractive Shadow Color | Subtractive ライトモードで太陽の影に使用する色を指定します。 |
| Reflection Intensity | スカイボックス/カスタムキューブマップのリフレクションがシーンに与える影響の度合いを設定します。 |
| Reflection Bounces | リフレクションを計算する際のパスの数を定義します。シーンは、各パスにおいて、反射オブジェクトに前のパスで計算されたリフレクションを適用した状態のキューブマップにレンダリングされます。1 に設定すると、シーンは 1 回レンダリングされます。この場合、リフレクションは別のリフレクションを反射できないので、他の反射サーフェスに映った反射オブジェクトは黒く表示されます。2 に設定すると、シーンは 2 回レンダリングされます。他の反射サーフェスに映った反射オブジェクトには、最初のパスのリフレクションが表示されます。 |
| Default Reflection Mode | 環境で使用するデフォルトのリフレクションモードを指定します。カスタムテクスチャを使用するか、スカイボックスから鏡面反射テクスチャを生成することができます。 |
| Default Reflection Resolution | デフォルトリフレクションのキューブマップの解像度を指定します。 |
| Halo Strength | ライトハローのサイズを指定します。どのライトでも、ハローのサイズはこの値に Light.range を乗算したものになります。 |
| Flare Strength | 環境内のすべてのフレアの強度を設定します。 |
| Flare Fade Speed | 環境内のすべてのフレアについてフェーディングのスピードを指定します。 |
| Skybox | シミュレーション環境で使用するスカイボックスマテリアルを設定します。 |
| Custom Reflection | デフォルトの鏡面反射として使用するキューブマップを指定します。 |
| Use Scene Sun | オンにすると、環境内のライトを太陽として使用します。 |
| Ambient Probe | スカイボックスのアンビエントライティングモードでは、この球面調和関数 (SH) プローブを使用してアンビエントを計算します。この方法で、完全にカスタムの SH プローブを割り当てることもできます。GI システムではアンビエントプローブがベイクされますが、ライトプローブまたはライトマップを使用するジオメトリではライトプローブやライトマップに環境ライティングがすでに存在するため、アンビエントプローブが実際に使用されることはありません。ライトプローブまたはライトマップが存在しない場合やオブジェクトに対して有効になっていない場合は、最後のフォールバックとして使用されます。 |
Plane Extraction Settings (PlaneExtractionSettings)
PlaneExtractionSettings コンポーネントを使用すると、環境内の Mesh Renderer から合成平面を生成できます。現在、平面抽出に寄与するのは Mesh Renderer だけです。Unity MARS では、Skinned Mesh Renderer や Sprite Renderer など、他のタイプのレンダラーからの平面の生成はサポートしていません。これらの生成された平面は環境にベイクされ、Instant (即時) シミュレーション用のデータを提供するために使用されます。一時的なシミュレーション (シミュレーションビューまたはゲームビューでの再生モード) では、これらの平面は無視され、代わりに新しい平面がインタラクティブに検出されます。
平面抽出プロセスは、ボクセル生成 ステップと生成されたボクセル内での 平面検出 ステップの 2 つのステップで構成されます。Extract Planes ボタンをクリックすると、現在の合成環境内の平面が抽出されます。
ノート: 以前に生成された平面 (Generated Planes ゲームオブジェクトの親) がシーン内にある場合、Unity MARS により除去されます。これらの平面を保持する場合は、平面の抽出前にそれらを親階層から移動します。
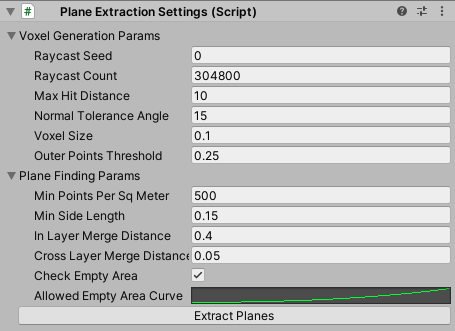
Voxel Generation Params
平面抽出では、環境メッシュから点群を生成し、各点をボクセルの 6 つのグリッドのどれかに追加します (3D の方位ごとに 1 つ)。Voxel Generation Params は、レイの生成方法、ボクセルのサイズ、ボクセルへの点の追加方法に関するパラメーターです。平面抽出時に適切なカバレッジを得るために、Raycast Count を環境の面積 * 50,000 に設定することをお勧めします。
| ターゲットとの関係 | 説明 |
|---|---|
| Voxel Generation Params | Voxel Generation Params は、MARS でのシミュレーション環境の点群の生成およびボクセル化に使用される設定です。これは、平面抽出のために環境を準備するときに使用します。 |
| Raycast Seed | レイの作成に使用される乱数ジェネレーターを初期化するためのシードです。 |
| Raycast Count | 点群の生成に使用されるレイキャストの数を指定します。 |
| Max Hit Distance | 各レイキャストの最大ヒット距離を設定します。 |
| Normal Tolreance Angle | 点の法線とボクセルのグリッド方向の間の角度がこの範囲内にある場合、その点がグリッドに追加されます。 |
| Voxel Size | 各ボクセルの辺の長さを指定します。 |
| Outer Points Threshold | これはしきい値です。点の法線と同じ方向を向いている境界の外側からこの距離内にある点は無視されます。 |
Plane Finding Params
Plane Finding Params のステップでは、十分な数の点が含まれたボクセルに基づいて、ボクセルの各グリッドにある平面が検出されます。
| ターゲットとの関係 | 説明 |
|---|---|
| Plane Finding Params | Plane Finding Params では、Voxel Generation Params を使用して生成された点とボクセルに基づいて、MARS で環境のサーフェスデータを生成するための設定を定義します。 |
| Min Points Per Square Meter | ボクセルサイズに依存しないボクセル点密度のしきい値を定義します。 |
| Min Side Length | x または y の範囲がこの値より小さい平面は無視されます。 |
| In Layer Merge Distance | 同じレイヤーに含まれ、お互いの距離がこの距離以下である平面はマージされます (通常、この値を 0.2 から 0.4 に設定すると、滑らかなオーサリング平面が得られます)。 |
| Cross Layer Merge Distance | 隣接するレイヤーに含まれ、高低差がこの値以下である平面はマージされます。 |
| Check Empty Area | 有効にすると、含まれる空の領域が一定以下の平面のみが作成されます。 |
| Allowed Empty Area Curve | 空であることが許容される面積の比率に対して平面の面積をマップするカーブです。 |
Simulated Playable (SimulatedPlayable)

このコンポーネントは、Playable Director コンポーネントがない場合にこれを自動的にアタッチします。このゲームオブジェクトにアタッチされた Playable Director は、一時的なシミュレーションがアクティブかどうかに基づいて再生を一時停止および再開します。
X Ray Collider (XRayCollider)

このコンポーネントは、合成環境用の X-Ray システムの一部です。このコンポーネントは、コライダーを X-Ray システムで無効可能なものとしてマークするため、X-Ray システムによってオブジェクトが非表示にされている場合、コライダーは無効になります。これにより、ユーザーは非表示のコライダーを操作することなく、環境内のコンテンツをドラッグアンドドロップしたり、閉じた空間内のオブジェクトを選択したりできます。この機能を有効にするには、外側のコライダーに XRayCollider コンポーネントをアタッチする必要があります。
X Ray Region (XRayRegion)
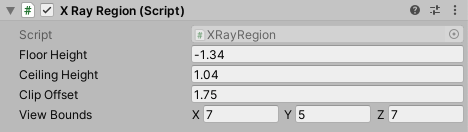
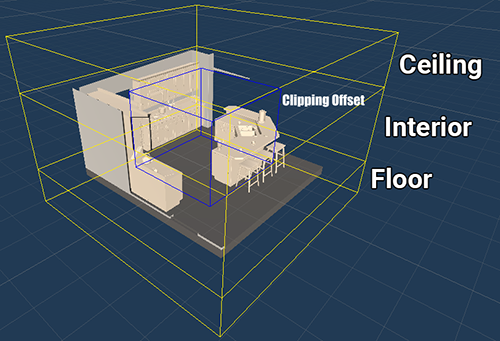
XRay Region コンポーネントでは、外壁や他の障害物を通して見ることができる環境の領域を設定します。X-Ray 領域は、天井、屋内、床の 3 つの部分に分割されます。Unity MARS では、以下の基準に基づいて領域をカリングします。
- カメラが天井より上にある場合、天井は完全にカリングされます。それ以外の場合は完全に表示されます。
- カメラが床より下にある場合、床は完全にカリングされます。それ以外の場合は完全に表示されます。
- 屋内は、XRayRegion コンポーネントの位置を中心とするビルボードの方向を カメラが向く場合にカリングされます。
X-Ray システムの影響を受けるレンダラーには、MARS/Room X-Ray シェーダーを使用する必要があります。このシェーダーを使用する既存の標準マテリアルは Content/Common/Materials にあり、床、壁、天井、カーペット、アクセントが含まれます。
| ターゲットとの関係 | 説明 |
|---|---|
| Floor Height | 床の高さをローカル座標で定義します。 |
| Ceiling Height | 天井の高さをローカル座標で定義します。 |
| Clip Offset | この領域の中心からカメラのクリップ面を前方に移動させる距離を設定します。 |
| View Bounds | クリップ領域のアクティブなサイズを指定します。 |
Simulated Mesh Classification (SimulatedMeshClassification)

シミュレーション環境内のオブジェクトを、このオブジェクトとその子から生成されたトラッキング対象のメッシュに適用される分類タイプでマークします。シミュレーションメッシュの作成の詳細については、シミュレーション環境 のセクションを参照してください。
| ターゲットとの関係 | 説明 |
|---|---|
| Classification Type | このオブジェクトとその子から生成されたトラッキング対象のメッシュの分類タイプを指定します。 |