ホイールコライダーを使った車の作成
The Wheel Collider component is powered by the PhysX 3 Vehicles SDK.
このチュートリアルでは、基本的な機能をもつ車を作成してみましょう。
まず初めに GameObject > 3D Object > Plane の順に選択してください。これは車が走る地面です。わかりやすくするために、地面の Transform を 0 にします (インスペクターウィンドウの Transform コンポーネントで、設定の歯車アイコンをクリックし Reset を選択)。Transform の Scale を 100 にして地面を拡大します。
基本的な車のスケルトンの作成
- まず、車のルートゲームオブジェクトになるゲームオブジェクトを作成します。 GameObject > Create Empty と選択し、ゲームオブジェクトの名前を
car_rootに変更します。 - Physics 3D Rigidbody コンポーネントを
car_rootに加えます。デフォルトで設定されている Mass (質量) 1kg では、デフォルトのサスペンション設定には軽すぎるので、1500kg に変更してずっと重くします。 - 次に、車体のコライダーを作成します。 GameObject > 3D Object > Cube を選択してください。作成したキューブを
car_rootの子のゲームオブジェクトにします。ローカル座標空間で完全に整列させるために、トランスフォームを 0 にリセットします。車は Z 軸に合わせて配置されているので、Transform の Scale の Z を 3 に設定します。 - ホイールをルートに加えます。
car_rootを選択しておき GameObject > Create Empty Child を選択します。名前をwheelsに変更します。Transform をリセットしてください。このゲームオブジェクトは強制ではありませんが、後で調節やデバッグを行うのに便利です。 - 最初のホイールを作成します。
wheelsゲームオブジェクトを選択しておいて GameObject > Create Empty Child の順に選び、名前をfrontLeftにします。Transform の Position を X を –1、Y を 0、Z を 1 に設定します。ホイールにコライダーを設定するには Add component > Physics > Wheel Collider の順に選択します。 -
frontLeftゲームオブジェクトを複製します。 Transform の Position の X を 1 に変更し、名前をfrontRightに変更します。 -
frontLeftとfrontRightオブジェクトの両方を選択します。それらを複製し、両方の Transform の Position の Z を −1 に変更します。それぞれ名前をrearLeftとrearRightに変更します。 - 最後に、
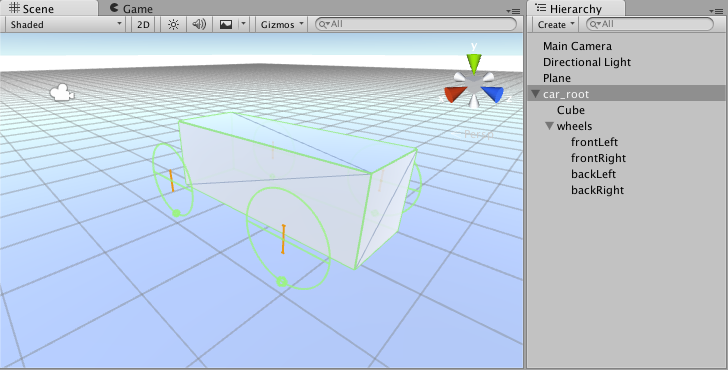
car_rootゲームオブジェクトを選択し、移動ツールを使用して、それを地面の少し上に上げます。
これで、下の図ように見えるはずです。
この車を実際に動かすにはコントローラーを作成する必要があります。下のコードサンプルはコントローラーとして使えます。
using UnityEngine;
using System.Collections;
using System.Collections.Generic;
public class SimpleCarController : MonoBehaviour {
public List<AxleInfo> axleInfos; // 個々の車軸の情報
public float maxMotorTorque; //ホイールに適用可能な最大トルク
public float maxSteeringAngle; // 適用可能な最大ハンドル角度
public void FixedUpdate()
{
float motor = maxMotorTorque * Input.GetAxis("Vertical");
float steering = maxSteeringAngle * Input.GetAxis("Horizontal");
foreach (AxleInfo axleInfo in axleInfos) {
if (axleInfo.steering) {
axleInfo.leftWheel.steerAngle = steering;
axleInfo.rightWheel.steerAngle = steering;
}
if (axleInfo.motor) {
axleInfo.leftWheel.motorTorque = motor;
axleInfo.rightWheel.motorTorque = motor;
}
}
}
}
[System.Serializable]
public class AxleInfo {
public WheelCollider leftWheel;
public WheelCollider rightWheel;
public bool motor; //このホイールがエンジンにアタッチされているかどうか
public bool steering; // このホイールがハンドルの角度を反映しているかどうか
}
car_root ゲームオブジェクト上で新しい C# スクリプトを作成し (Add Component > New Script)、このコード例をスクリプトにコピーし、 SimpleCarController.cs で保存します。スクリプトのパラメーターを以下のように微調整できます。設定をテストするには再生モードで試してみます。
以下の設定は車のコントローラーとしてとても効果的です。

ヒント: 必ず AxleInfos の size を増やしてください。
1 台の車に最大 20 のホイールを設定することができ、それぞれにハンドル、エンジン、ブレーキのトルクを適用できます。
今度は、視覚的なホイールに移ります。ご覧のとおり、Wheel Collider はシミュレーションしたホイール位置と回転を Wheel Collider の Transform には適用しません。そのため、視覚的なホイールを追加するには、いくらか工夫が必要です。
まず、いくつかホイールジオメトリを作らなくてはなりません。シリンダーから簡単なホイール形状を作れます。視覚的なホイールを追加するにはいくつか方法があります。スクリプトプロパティで、手動で視覚的なホイールを割り当てるか、または、いくつかのロジックを書いて、自動的に対応する視覚的なホイールを検索します。私たちは、2 番目の方法を使用します。Wheel Collider ゲームオブジェクトに、視覚的なホイールを付加します。
コントローラースクリプトを変更します。
using UnityEngine;
using System.Collections;
using System.Collections.Generic;
[System.Serializable]
public class AxleInfo {
public WheelCollider leftWheel;
public WheelCollider rightWheel;
public bool motor;
public bool steering;
}
public class SimpleCarController : MonoBehaviour {
public List<AxleInfo> axleInfos;
public float maxMotorTorque;
public float maxSteeringAngle;
// 対応する視覚的なホイールを見つけます
// Transform を正しく適用します
public void ApplyLocalPositionToVisuals(WheelCollider collider)
{
if (collider.transform.childCount == 0) {
return;
}
Transform visualWheel = collider.transform.GetChild(0);
Vector3 position;
Quaternion rotation;
collider.GetWorldPose(out position, out rotation);
visualWheel.transform.position = position;
visualWheel.transform.rotation = rotation;
}
public void FixedUpdate()
{
float motor = maxMotorTorque * Input.GetAxis("Vertical");
float steering = maxSteeringAngle * Input.GetAxis("Horizontal");
foreach (AxleInfo axleInfo in axleInfos) {
if (axleInfo.steering) {
axleInfo.leftWheel.steerAngle = steering;
axleInfo.rightWheel.steerAngle = steering;
}
if (axleInfo.motor) {
axleInfo.leftWheel.motorTorque = motor;
axleInfo.rightWheel.motorTorque = motor;
}
ApplyLocalPositionToVisuals(axleInfo.leftWheel);
ApplyLocalPositionToVisuals(axleInfo.rightWheel);
}
}
}
Wheel Collider コンポーネントのうち大切なパラメーターの 1 つは Force App Point Distance です。これは、ホイールの基準となる静止位置からホイールの力が適用される位置までの距離を示します。デフォルト値は 0 、つまり、ホイールの基準となる静止位置に力を適用します。しかし、実際は車の重心より少し下にこの位置を置くとよいでしょう。
Copyright © 2023 Unity Technologies
优美缔软件(上海)有限公司 版权所有
"Unity"、Unity 徽标及其他 Unity 商标是 Unity Technologies 或其附属机构在美国及其他地区的商标或注册商标。其他名称或品牌是其各自所有者的商标。
公安部备案号:
31010902002961