Unity의 회전 및 방향
Unity uses a left-handed coordinate system. In Unity, you can use both Euler angles and quaternions to represent rotations and orientation. These representations are equivalent but have different uses and limitations.
보통 씬에서는 방향을 오일러 각으로 표시하는 트랜스폼 컴포넌트를 사용하여 오브젝트를 회전합니다. 그러나 Unity는 회전과 방향을 내부적으로 쿼터니언으로 저장하므로 짐벌 락으로 이어질 수도 있는 더 복잡한 모션에 유용할 수 있습니다.
Left-handed coordinate system
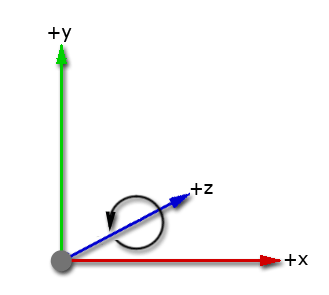
A coordinate system describes the position of objects in a three-dimensional space. Unity uses a left-handed coordinate system: the positive x-axis points to the right, the positive y-axis points up, and the positive z-axis points forward. Unity’s left-handed coordinate system means that the direction of rotation from the positive x-axis to the positive y-axis is counterclockwise when looking along the positive z-axis.
오일러 각
트랜스폼 좌표에서 Unity는 벡터 프로퍼티 Transform.eulerAngles X, Y, Z를 사용하여 회전을 표시합니다. 노멀 벡터와는 달리 이 값은 X, Y, Z 축에 대한 실제 회전 각도(단위: 도)를 나타냅니다.
오일러 각 회전은 3개의 축을 중심으로 3개의 개별 회전을 수행합니다. Unity는 Z축, X축, Y축을 중심으로 오일러 회전을 순차적으로 수행합니다. 이 회전 방법은 외부 회전입니다. 회전하는 동안 원래 좌표계가 변경되지 않습니다.
게임 오브젝트를 회전하려면 각 축이 트랜스폼 컴포넌트로 회전할 각의 크기를 입력할 수 있습니다. 스크립트로 게임 오브젝트를 회전하려면 Transform.eulerAngles를 사용합니다. 오일러 각으로 변환하여 계산하고 회전하려면 짐벌 락 문제가 발생할 위험이 있습니다.
짐벌 락
3D 공간에 있는 오브젝트가 자유도를 잃고 2차원 내에서만 회전할 수 있는 경우를 짐벌 락이라고 합니다. 두 축이 평행하면 오일러 각으로 짐벌 락이 발생할 수 있습니다. 스크립트에서 회전 값을 오일러 각으로 변환하지 않으면 쿼터니언을 사용하여 짐벌 락을 방지해야 합니다.
짐벌 락 문제가 있는 경우 Transform.RotateAround를 사용하면 오일러 각을 피할 수 있습니다. 각 축에 Quaternion.AngleAxis를 사용하여 함께 곱할 수도 있습니다(쿼터니언 곱셈은 각 회전에 차례로 적용됩니다).
쿼터니언
쿼터니언은 3D 공간에서 공간 방향과 회전의 고유한 표현을 위한 수학적 표기법을 제공합니다. 쿼터니언은 4개의 숫자를 사용하여 3D에서 단위 축을 중심으로 회전 방향과 각도를 인코딩합니다. 이 4개의 값은 각이나 각의 크기가 아닌 복소수입니다. 자세한 내용은 쿼터니언의 수학을 참조하십시오.
Unity converts rotational values to quaternions to store them because quaternion rotations are efficient and stable to compute. The Unity Editor doesn’t display rotations as quaternions because a single quaternion can’t represent a rotation greater than 360 degrees about any axis.
You can use quaternions directly if you use the Quaternion class. If you use script for your rotations, you can use the Quaternion class and functions to create and change rotational values. You can apply values to your rotation as Euler angles but you need to store them as quaternions to avoid problems.
오일러 각과 쿼터니언 간의 전환
다음 스크립트를 사용하여 쿼터니언과 오일러 각 간을 변환하고 원하는 방식으로 회전을 보고 편집할 수 있습니다.
-
Quaternion.Euler함수를 사용하여 오일러 각도에서 쿼터니언으로 변환할 수 있습니다. -
Quaternion.eulerAngles함수를 사용하여 쿼터니언을 오일러 각으로 변환할 수 있습니다.
추가 리소스
Copyright © 2023 Unity Technologies
优美缔软件(上海)有限公司 版权所有
"Unity"、Unity 徽标及其他 Unity 商标是 Unity Technologies 或其附属机构在美国及其他地区的商标或注册商标。其他名称或品牌是其各自所有者的商标。
公安部备案号:
31010902002961