Wheel Joint 2D
Utilice la Wheel Joint 2D para simular una rueda que gira, sobre la cual un objeto puede moverse. Puede aplicar potencia de motor al joint (articulación). La rueda utiliza una suspensión “resorte” para mantener su distancia desde el cuerpo principal del vehículo.
Propiedades
| Propiedad: | Función: |
|---|---|
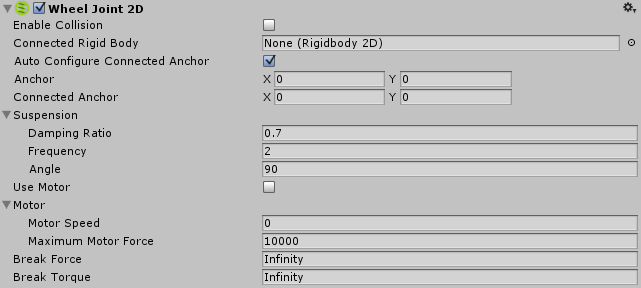
| Enable Collision | Pueden los dos objectos conectados colisionar con el otro? Marque la casilla si sí. |
| Connected Rigid Body | Especifique aquí el otro objeto con el que se conecta esta articulación. Deje esto como None y el otro extremo de la articulación se fijará en un punto en el espacio definido por el Connected Anchor setting. Seleccione el circulo a la derecha del campo para ver una lista de objetos a los que conectarse. |
| Auto Configure Connected Anchor | Marque esta casilla para establecer automáticamente la ubicación del anclaje para el otro objeto con el que se conecta esta articulación. (Marque esto en lugar de completar los campos Connected Anchor.) |
| Anchor | The place (in terms of X, Y co-ordinates on the RigidBody) where the end point of the joint connects to this object. |
| Connected Anchor | The place (in terms of X, Y co-ordinates on the RigidBody) where the end point of the joint connects to the other object. |
| Damping Ratio | The degree to which you want to suppress spring oscillation in the suspension: In the range 0 to 1, the higher the value, the less movement. |
| Frequency | The frequency at which the spring in the suspension oscillates while the objects are approaching the separation distance you want (measured in cycles per second): In the range 0 to 1,000,000 - the higher the value, the stiffer the suspension spring. |
| Angle | The world movement angle for the suspension. |
| Use Motor | Apply a motor force to the wheel? Check the box for yes. |
| Motor | |
| Motor Speed | Target speed (degrees per second) for the motor to reach. |
| Maximum Motor Force | Maximum force applied to the object to attain the desired speed. |
| Break Force | Specify the force level needed to break and so delete the joint. Infinity means it is unbreakable. |
| Break Torque | Specify the torque level needed to break and so delete the joint. Infinity means it is unbreakable. |
Detalles
(Mirar también Joints 2D: Detalles y Recomendaciones para información útil de contexto acerca de todos los 2D Joints.)
Utilice este joint (articulación) para simular las ruedas y la suspensión. El objetivo de la articulación es mantener la posición de dos puntos en una línea que se extiende hasta el infinito, mientras que al mismo tiempo se superponen. Estos dos puntos pueden ser dos componentes Rigidbody2D o un componente Rigidbody2D y una posición fija en el mundo. (Conéctese a una posición fija en el mundo ajustando Connected Rigidbody a None).
El Wheel Joint 2D actúa como una combinación de un Slider Joint 2D (sin sus restricciones de motor o limites) y un Hinge Joint 2D (sin sus restricciones de limites).
El joint aplica una fuerza lineal a ambos objetos rigid body conectados para mantenerlos en la línea, un motor angular para girar los objetos en la línea, y un resorte para simular la suspensión de la rueda.
Configure el Maximum Motor Speed y Maximum Motor Force (torque, en este joint (articulación)) para controlar la velocidad angular del motor, y hacer que los dos objetos rigid body giren.
Puede ajustar la rigidez y el movimiento de la suspensión de la rueda:
Rigido, suspensión apenas móvil…
Una alta (1,000,000 es la más alta) Frequency == suspensión rígida.
Un alto (1 es el más alto) Damping Ratio == una suspensión que apenas se mueve.
Suspensión suelta y móvil…
Una Frequency baja == suspensión suelta.
Un Damping Ratio bajo == suspensión en movimiento.
Tiene dos restricciones simultáneas:
- Mantiene una distancia lineal relativa cero lejos de una línea especificada entre dos puntos de anclaje en dos objetos rigid body.
- Mantiene una velocidad angular entre dos puntos de anclaje en dos objetos rigid body . (Configure la velocidad mediante la opción Maximum Motor Speed y el torque máximo mediante Maximum Motor Force.)
Por Ejemplo:
Puede utilizar este joint (articulación) para construir objetos físicos que necesitan reaccionar como si estuvieran conectados con un pivote rotacional, pero no pueden alejarse de una línea especificada. Como:
- Simular ruedas con un motor para accionar las ruedas y una línea que define el movimiento permitido para la suspensión.
Recomendaciones
Wheel Joint 2D se comporta diferente al Wheel Collider:
A diferencia del Wheel Collider utilizado con física 3D, el Wheel Joint 2D utilizar un objeto Rigidbody separado para la rueda, el cual gira cuando una fuerza es aplicada. (El Wheel Collider, por el contrario, simula la suspensión utilizando un raycast y la rotación de la rueda es puramente un efecto gráfico). El objeto rueda típicamente va a ser un Circle Collider 2D con un Physics Material 2D que da la cantidad adecuada de tracción para su juego.
Para simular un coche u otro vehículo:
Configura la propiedad Motor Speed en cero en el inspector y luego varíela desde script de acuerdo al input del jugador. Usted puede cambiar el valor de Maximum Motor Force para simular el efecto del cambio de engranaje y power-ups.
Zero frequency:
Cero en la Frequency es un caso especia: Da el resorte más rígido posible.
Copyright © 2023 Unity Technologies
优美缔软件(上海)有限公司 版权所有
"Unity"、Unity 徽标及其他 Unity 商标是 Unity Technologies 或其附属机构在美国及其他地区的商标或注册商标。其他名称或品牌是其各自所有者的商标。
公安部备案号:
31010902002961