Relative Joint 2D
The Relative Joint 2D connects two GameObjects controlled by Rigidbody physics to maintain in a position based on each other’s location. Use this joint to keep two objects offset from each other, at a position and angle you decide.
Refer to Comparing Fixed and Relative joints 2D for the differences between Relative Joint2D and FixedJoint2D.
| 프로퍼티 | 기능 |
|---|---|
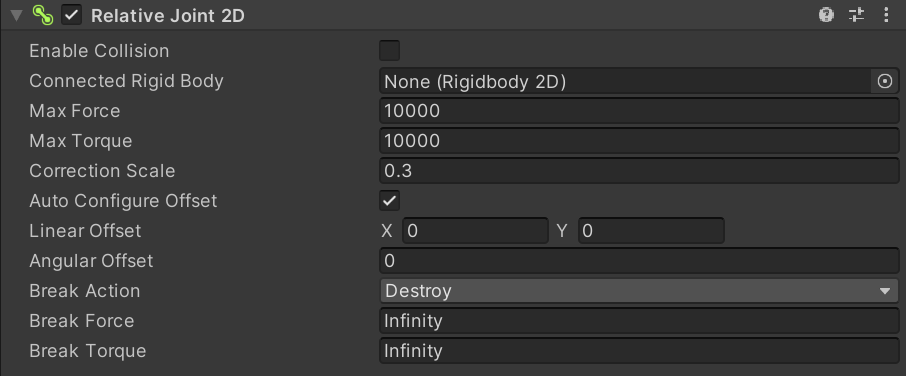
| Enable Collision | Enable this property to enable collisions between the two connected GameObjects. |
| Connected Rigid Body | Specify the other object this joint connects to. Leave this as None to have the other end of the joint fixed at a point in space defined by the Connected Anchor property. Select the circle icon to the right to view a list of GameObjects to connect to. |
| Max Force | Set the linear (or straight line) movement between joined GameObjects. A high value (up to 1,000) uses high force to maintain the offset. |
| Max Torque | Set the angular (or rotation) movement between joined GameObjects. A high value (up to 1000) uses high force to maintain the offset. |
| Correction Scale | Tweak the joint to correct its behaviorif required. Increasing the Max Force or Max Torque may affect the joint’s behavior such that the joint doesn’t reach its target, requiring you to correct it by adjusting this setting. The default setting is 0.3. |
| Auto Configure Offset | Enable this property to automatically set and maintain the distance and angle between the connected objects. You do not need to manually enter the Linear Offset and Angular Offset when you enable this property. |
| Linear Offset | Enter local space coordinates to specify and maintain the distance between the connected objects. |
| Angular Offset | Enter local space coordinates to specify and maintain the angle between the connected objects. |
| Break Action | Set the action taken when either the force or torque threshold is exceeded. |
| Break Force | Set the force threshold which if exceeded, will cause the joint to perform the selected Break Action. The default value is set to Infinity, which can never be exceeded and therefore the Break Action can never be taken while the threshold remains at this value. |
| Break Torque | Set the torque threshold which if exceeded, will cause the joint to perform the selected Break Action. The default value is set to Infinity, which can never be exceeded and therefore the Break Action can never be taken while the threshold remains at this value. |
Using this joint
The aim of this joint is to maintain a relative linear and angular distance (offset) between two points. Those two points can be two Rigidbody2D components or a Rigidbody2D component and a fixed position in the world. Note: Connect to a fixed position in the world by setting Connected Rigidbody to None.
The joint applies a linear and angular (torque) force to both connected Rigidbody objects. It uses a simulated motor that is preconfigured to be quite powerful: It has a high Max Force and Max Torque limit. You can lower these values to make the motor less powerful motor or turn-off it off completely.
조인트의 두 가지 동시적 제약사항.
- Maintain the specified linear offset between the two Rigidbody objects.
- Maintain the starting angular offset between the two Rigidbody objects.
조인트를 다음에 필요한 물리 오브젝트를 구성하는 데 사용할 수 있습니다.
- 마치 서로에게서 더 이상 멀어지거나 가까워질 수 없는 듯 일정 거리를 유지합니다(두 오브젝트 사이의 거리는 직접 지정하며 이 거리는 실시간으로 바뀔 수 있습니다).
- 서로에 대해 특정 각도로만 회전합니다(이 각도 역시 지정합니다).
어떤 경우 유연한 연결이 필요할 때도 있습니다. 예를 들어 플레이어에게 추가 포대가 따라오는 스페이스 슈터 게임을 생각해보겠습니다. 상대 조인트를 활용하면 포대가 따라올 때 약간의 지연을 주면서도 플레이어와 회전할 때는 지연이 없게 만들 수 있습니다.
Some uses may need a configurable force, such as: A game where the camera follows a player using a configurable force to keep track.
Comparing Fixed and Relative joints 2D
FixedJoint2D is spring type joint. RelativeJoint2D is a motor type joint with a maximum force and/or torque.
- 고정 조인트는 스프링으로 상대 리니어 및 앵글 오프셋을 유지하며 상대 조인트는 모터를 활용합니다. 조인트의 스프링이나 모터를 설정할 수 있습니다.
- The Fixed joint works with anchor points (it’s derived from script AnchoredJoint2D): It maintains the relative linear and angular offset between the anchors. The Relative joint doesn’t have anchor points (it’s derived directly from script Joint2D).
- 상대 조인트는 상대 리니어와 앵글 오프셋을 실시간으로 수정할 수 있지만 고정 조인트는 불가합니다.
추가 리소스
- Refer to Joints 2D for more information about other 2D Joints.
RelativeJoint2D
Copyright © 2023 Unity Technologies
优美缔软件(上海)有限公司 版权所有
"Unity"、Unity 徽标及其他 Unity 商标是 Unity Technologies 或其附属机构在美国及其他地区的商标或注册商标。其他名称或品牌是其各自所有者的商标。
公安部备案号:
31010902002961